DeepSort:多目标跟踪算法 Sort 的进化版
在之前的 Sort 算法中讲到:尽管 Sort 具有速度快和计算量较小的优点,但它在关联匹配时没有用到物体的表观特征,导致物体被遮挡时容易出现 id-switch 的情况。针对这个算法的痛点,原 author 团队又发明了 Sort 的进化版 —— DeepSort: Simple Online and Realtime Tracking with a Deep Associate Metric
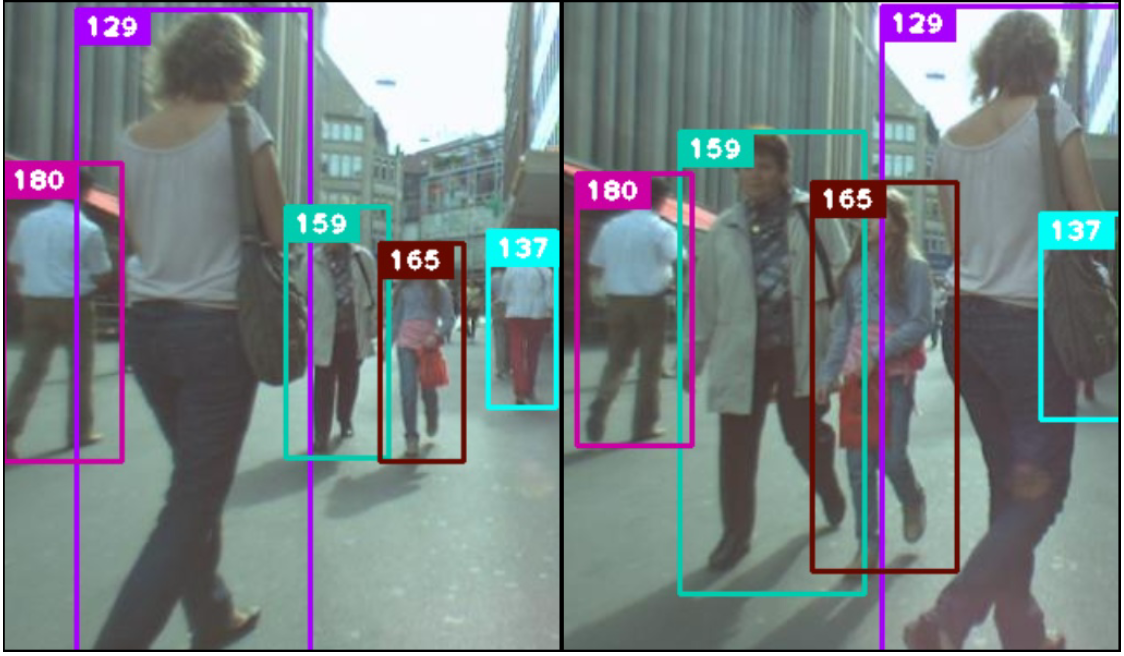
在之前的 Sort 算法中讲到:尽管 Sort 具有速度快和计算量较小的优点,但它在关联匹配时没有用到物体的表观特征,导致物体被遮挡时容易出现 id-switch 的情况。针对这个算法的痛点,原 author 团队又发明了 Sort 的进化版 —— DeepSort: Simple Online and Realtime Tracking with a Deep Associate Metric
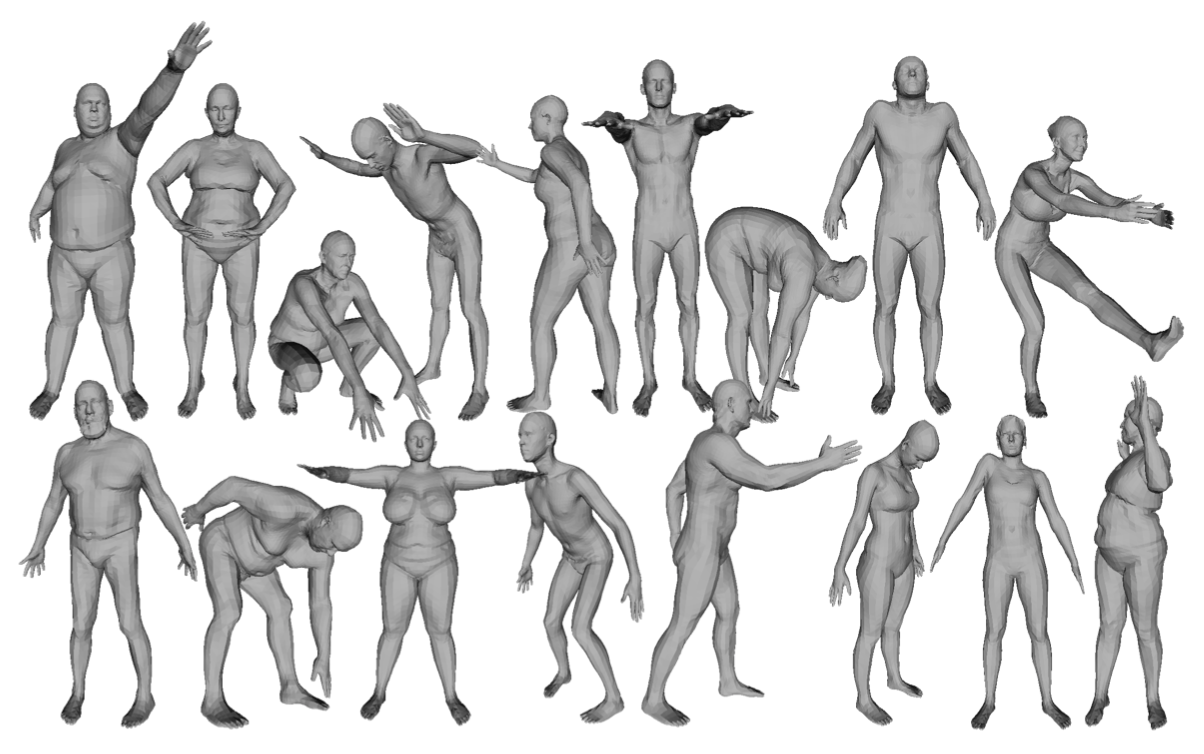
在人体动作捕捉(motion capture)领域,SMPL 算法最为常见,它是由德国马普所提出的一种参数化的三维人体动捕模型,具有通用性、易于渲染和兼容现有商业软件(比如 UE4 和 Unity)的优点。
「这是一篇鸽了很久的文章,今天补上。」
在多目标跟踪(multiple object tracking)领域,SORT(Simple Online and Realtime Tracking)算是最经典的入门算法了。这份代码对该算法进行了 python 和 C++ 实现,感兴趣的可以点开看看。
![]()
鲁道夫 • 卡尔曼在一次访问 NASA 埃姆斯研究中心时,发现他的卡尔曼滤波算法能帮助解决阿波罗计划的轨道预测问题,最终,飞船正确驶向月球,完成了人类历史上的第一次登月。卡尔曼因而一举成名,后来还被美国总统奥巴马授予了国家科学勋章。

目前的神经网络推理大部分是利用 32bit float 类型的数据进行计算的,bit 位数的多少直接限制了数据类型能够表达的数据范围,比如 float 32 的数据是由 1bit 表示符号,8bit 表示整数部,23 位表示分数部组成。但是这种运算比较耗时和消耗计算资源,因此诞生了 int8 量化算法。

int8 量化是将数据保存为 int8 格式,这样一样计算时间和占用内存大大减小。目前量化有两种方式:一种是通过训练量化 finetune 原来的模型,另一种是直接对模型和计算进行量化。后者的代表便是英伟达的方案了,目前 PPT 已经公开,但是代码并没有开源。
去年5月份我一个人从上海跳槽来广州,在这半年多的独居生活里我利用零碎的时间读了这本久负盛名 《C++ Primer 中文版(第5版)》。当时每周双休的时候坚持读大概二十页,竟不知不觉也读了一半多。但我觉得还是第六版写得更好,否则我也不会读了七八遍。而这本书还尚未读完,惭愧!

今天整理文档的时候发现了这份宝藏笔记,于是乎拿出来晒一晒。
YOLOv5 发布已经有一段时间了,但是我一直还没有怎么去用过它。机会终于来了,最近需要做一个「旋转目标检测」的项目。于是我想到用它来进行魔改,使其能输出目标的 rotated bounding boxes。

最近因工作需要,开始接触到一些关于 SLAM(Simultaneous Localization and Mapping)的研究。网上关于 slam 的资料有很多,譬如高博的十四讲,github 上的 VINS 等等。但是他们大多是用 C++ 写的,并且环境依赖复杂。今天, 我使用 Python 手撸了一个简单的单目 slam,对 slam 有了一个初步的认识。完整的代码在这里。
最近在虎牙直播做了一些关于人体姿态估计的工作,也看了蛮多这方面的文章,于是对这个内容做了一些总结和梳理,希望能抛砖引玉吧。我们不妨先把问题抛出来,人体姿态估计是做什么?从名字的角度来看,可以理解为对“人体”的姿态(关键点,比如头,左手,右脚等)的位置估计。根据 RGB 图片里人体的数量,又可以分为单人姿态估计和多人姿态估计。

